En esta entrada se presentan los resultados del análisis del desempeño de la cámara astronómica QHY174GPS. Se analizó su linealidad, dependencia de la corriente oscura con la temperatura, ganancia, ruido de lectura y rango dinámico.

La QHY174GPS forma parte de la línea de cámaras científicas de la firma QHYCCD. Es una cámara refrigerada basada en un sensor CMOS SONY IMX174 cuyas especificaciones se resumen en la tabla a continuación. Adicionalmente, tiene integrado un módulo GPS que le permite tener una referencia de tiempo precisa para la adquisición de imágenes.
| Especificación | Valor |
|---|---|
| Área efectiva | 1920 x 1200 píxeles |
| Tamaño de píxel | 5,86μm x 5,86μm |
| Tamaño del sensor | 11,25mm x 7,03mm |
| QE pico | 78% |
| Capacidad del pozo | > 32Ke- |
| AD | 12bits (salida en 16bits) |
| Ruido de lectura | 5,3e- (a ganancia 0) |
| Otros: | Control anti-glow. Obturador electrónico global. Control de temperatura por refrigerador termoeléctrico de dos etapas. |
Estas especificaciones la hacen apropiada para su uso en astrometría y fotometría. Para profundizar el conocimiento de su desempeño se realizaron las caracterizaciones de linealidad, corriente oscura, ganancia, ruido de lectura y rango dinámico que se presentan a continuación.
Linealidad
Para obtener la linealidad se expuso al sensor a una iluminación constante, para esto se lo colocó frente a un monitor y se realizó un barrido del tiempo de exposición, es decir, se obtuvieron imágenes flat para distintos tiempos de exposición. Se inició con un tiempo de exposición cercano a cero, tal que el nivel fue prácticamente 0 cuentas y se incrementó, en pasos, hasta que se llegó al nivel de saturación (65535 cuentas). Para cada tiempo de exposición se obtuvieron 10 imágenes. La cámara se configuró con offset = 50, ganancia = 0 y temperatura = 0°C.

Posteriormente se calibraron las imágenes flat con imágenes bias y dark y se combinaron las 10 imágenes de cada tiempo de exposición, para minimizar los efectos del ruido, obteniendo así los masters flat. Finalmente, para cada tiempo de exposición se calculó el promedio del nivel de los píxeles contenidos en un área de interés de 256x256 píxeles centrada en la zona con iluminación más uniforme de la imagen.

De esta manera se obtuvo la intensidad, cantidad de cuentas o ADUs, en función del tiempo de exposición que se muestra en el gráfico a continuación. Tal como se aprecia, los valores medidos (puntos azules), prácticamente no se apartan de la respuesta lineal (recta gris). La recta que interpola la respuesta lineal esperada se ajustó descartando los primeros tres puntos ya que tienen residuos mayores a una desviación estándar.

Adicionalmente se calculó el error porcentual dado por \(\varepsilon_{\%} = 100 . |\frac{F_M - F_E}{F_E}|\) y el error de magnitud dado por \( \varepsilon_{Mag} = |2,5.log_{10}(\frac{F_M}{F_E})| = |2,5.log_{10}(\frac{\varepsilon_{\%}}{100} + 1)| \). Donde, \(F_M\) es el flujo o cantidad de cuentas medidas y \(F_E\) es el flujo o cantidad de cuentas esperadas (estimado a partir de la recta interpolada). A continuación se muestran ambos errores en función del nivel esperado.

Este gráfico expone de manera más evidente los efectos de la linealidad. En primer efecto notable es que no hay pérdida de linealidad conforme las cuentas se acercan al nivel de saturación, se puede inferir en que por encima de 10 mil cuentas la linealidad se mantiene aproximadamente por debajo del 1% de error, lo que implica un error de 0,01 magnitudes. Esto es un aspecto muy importante a la hora de adquirir imágenes para fotometría ya que habitualmente, por desconocimiento, se evita tener improntas de estrellas superiores a 50 mil cuentas ya que se supone que la respuesta es alineal. Este análisis evidencia que el error por alinealidad por encima de 50 mil cuentas es comparable al error a un nivel medio (25 mil a 40 mil cuentas). En efecto, para esta cámara no supone un problema de alinealidad tener un nivel de cuentas cercano a la saturación.
El segundo efecto que puede apreciarse es que la alinealidad se destaca por debajo de las 10 mil cuentas. De esto se desprenden dos consideraciones para el uso de las cámara. Por un lado se deberá evitar que el objeto de interés presente intensidades en dicho rango. Y por otro lado, hay que tener en cuenta que por mas que una estrella presente un pico alto, de 45 mil cuentas por ejemplo, existen píxeles en los que la impronta que tienen niveles por debajo de 10 mil cuentas y aportarán información con mayor error. Para fotometría, esto podría mitigarse eligiendo círculos de apertura que excluyan los pixeles con niveles por debajo de 10 mil cuentas.
Por último, hay que entender la importancia de realizar el análisis de linealidad en términos de magnitud y no solo en términos de cantidad de cuentas. Se debe tener en cuenta que para esta cámara la alinealidad podría contribuir con errores en el orden de la centésima de magnitud.
La tabla muestra el detalle de los resultados para cada tiempo de exposición.
| # | T_exp | Valor Medido [ADU] |
Valor Esperado [ADU] |
Error [ADU] |
Error % [%] |
Error de Magnitud [Mag] |
|---|---|---|---|---|---|---|
| 0 | 0.001 | 3.6 | 372.0 | -368.4 | 99.0 | 0.747 |
| 1 | 0.01 | 27.6 | 397.3 | -369.7 | 93.1 | 0.714 |
| 2 | 0.1 | 284.3 | 650.4 | -366.0 | 56.3 | 0.485 |
| 3 | 0.5 | 1432.6 | 1775.1 | -342.5 | 19.3 | 0.192 |
| 4 | 1 | 2873.0 | 3180.9 | -308.0 | 9.7 | 0.100 |
| 5 | 2 | 5753.1 | 5992.7 | -239.6 | 4.0 | 0.043 |
| 6 | 3 | 8614.1 | 8804.5 | -190.4 | 2.2 | 0.023 |
| 7 | 4 | 11538.8 | 11616.2 | -77.5 | 0.7 | 0.007 |
| 8 | 5 | 14386.3 | 14428.0 | -41.7 | 0.3 | 0.003 |
| 9 | 6 | 17298.5 | 17239.7 | 58.7 | 0.3 | 0.004 |
| 10 | 7 | 20133.7 | 20051.5 | 82.2 | 0.4 | 0.004 |
| 11 | 8 | 23057.9 | 22863.2 | 194.6 | 0.9 | 0.009 |
| 12 | 9 | 25874.7 | 25675.0 | 199.7 | 0.8 | 0.008 |
| 13 | 10 | 28786.1 | 28486.8 | 299.4 | 1.1 | 0.011 |
| 14 | 11 | 31546.9 | 31298.5 | 248.3 | 0.8 | 0.009 |
| 15 | 12 | 34436.5 | 34110.3 | 326.3 | 1.0 | 0.010 |
| 16 | 13 | 37152.4 | 36922.0 | 230.3 | 0.6 | 0.007 |
| 17 | 14 | 40025.9 | 39733.8 | 292.1 | 0.7 | 0.008 |
| 18 | 15 | 42676.5 | 42545.5 | 131.0 | 0.3 | 0.003 |
| 19 | 16 | 45547.3 | 45357.3 | 190.0 | 0.4 | 0.005 |
| 20 | 17 | 48256.2 | 48169.0 | 87.2 | 0.2 | 0.002 |
| 21 | 18 | 51047.5 | 50980.8 | 66.7 | 0.1 | 0.001 |
| 22 | 19 | 53760.2 | 53792.6 | -32.4 | 0.1 | 0.001 |
| 23 | 20 | 56522.3 | 56604.3 | -82.0 | 0.1 | 0.002 |
| 24 | 21 | 59201.7 | 59416.1 | -214.4 | 0.4 | 0.004 |
| 25 | 22 | 61916.5 | 62227.8 | -311.3 | 0.5 | 0.005 |
| 26 | 23 | 64472.6 | 65039.6 | -566.9 | 0.9 | 0.009 |
Todo el procesamiento fue realizado con las librerías Astropy y Ccdproc, de Python, no obstante puede hacerse con cualquier software de procesamiento de imágenes astronómicas (por ejemplo Maxim DL). Para quien tenga interés; aqui puede encontrar el código que he utilizado para el procesamiento.
Corriente oscura
Se evaluó el nivel de corriente oscura (Dark Current, DC) en función de la temperatura con el objetivo de determinar la temperatura de operación óptima de la cámara. Para ellos se obtuvieron imágenes dark con tiempo de exposición, offset y ganancia fijos (60s, 50 y 0 respectivamente) para puntos de ajuste (set-point) de temperatura desde -20°C a 25°C en pasos de 5°C. Posteriormente todas las imágenes fueron corregidas por bias y se calculó el nivel promedio de la imagen. Dicho valor representa el nivel de corriente oscura en función de la temperatura. A continuación se presentan los resultados obtenidos en función de la temperatura real del detector, extraído del encabezado del archivo FIT, ya que este normalmente difiere del punto de ajuste.
| # | Temp. [°C] |
DC Media [ADU] |
|---|---|---|
| 0 | -19.9 | 35.6 |
| 1 | -15.0 | 35.3 |
| 2 | -9.8 | 35.8 |
| 3 | -4.9 | 36.4 |
| 4 | 0.0 | 37.2 |
| 5 | 6.0 | 40.4 |
| 6 | 10.5 | 45.8 |
| 7 | 14.8 | 58.1 |
| 8 | 20.6 | 79.2 |
| 9 | 23.0 | 98.4 |

En la imagen se aprecia la característica dependencia exponencial de la corriente oscura con la temperatura. Por debajo de 0°C el valor medio de la corriente oscura prácticamente no disminuye. Configurar la temperatura de operación por debajo de 0°C hace que el sistema de refrigeración trabaje mas exigido con una reducción en la corriente oscura insignificante. Por lo tanto, 0°C es un valor de trabajo adecuado para esta cámara.
Todo el procesamiento fue realizado con las librerías Astropy y Ccdproc, de Python, no obstante puede hacerse con cualquier software de procesamiento de imágenes astronómicas (por ejemplo Maxim DL). Para quien tenga interés; aqui puede encontrar el código que he utilizado para el procesamiento.
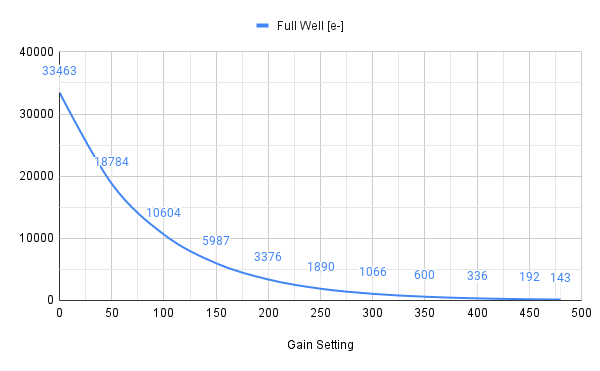
Ganancia, ruido de lectura y rango dinámico



Comentarios
Publicar un comentario